 主な担当一覧
主な担当一覧
2000年度「MMT展」へのマイクロマウス展示についてのレポート
2000/12/12 情報工学科 不死川魔沙王(r00h0390)
テーマ:「マイクロマウス」を作成し、駅前校「MMT展」で出展する。
研究時期:2000年5月〜10月
研究場所:洛北校J教室・制御通信部部室(白川校裏)
作成者:制御通信部ハードウエア部門共同製作
主な担当一覧
| 車体 | 中西征孝 |
| CPU(本体) | 合田誠 |
| CPU(拡張部分) | 不死川魔沙王 |
| モータドライブ回路 | 不死川魔沙王 |
| センサ | 不死川魔沙王 |
| Z80プログラミング | 不死川魔沙王 |
| 展示等協力 | 越山穣 |
| 総合監修 | 久保田先生 |
第一章 マイクロマウスとは
マイクロマウスとは、マイコン応用システムを利用して迷路探索・走行を行う自立型ロボットのことである。
第二章 データ
| 車体 | アルミボディを使用 |
| CPU | AKI80を8255で拡張したものを使用 |
| モータ | ステッピングモータ2つを8713使用の回路で制御 |
| センサ | 壁上面検出タイプ、フォトリフレクタ12個(前2つ、左右各5つ) |
| 電池 | モータ部 ニッカド電池9.6ボルト(単2型×8本) CPU・センサ ニッカド電池7.2ボルト(単2型×6本) |
| ソフト | Z80アセンブラ |
ソフト開発の方法:DOS/V機上のエディタ(SE3、秀丸)でコーディングを行い、IR80とリンカを用いてアセンブルとリンクを行った。AKI80へのHEXファイルの転送にはRS232Cを用いた。
第三章 各部の詳しい説明
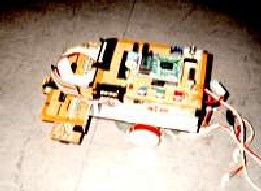
車体
駆動系としてステッピングモータを二つ張り合わせたものを使い、前と後ろにボールキャスタをそれぞれ取り付けた。
(左)裏返したところ (右)センサ部のみ車体に取り付け、電池を載せたところ
CPU部回路
CPUボード本体の回路図
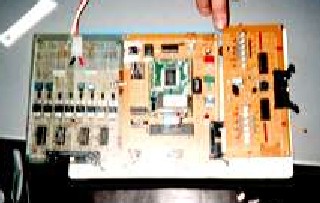
写真左からモータードライブ回路、CPU回路、センサ回路
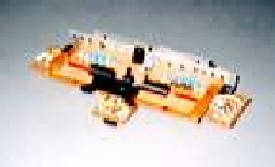
モータドライブ回路
モータドライブ回路とCPU部結合のため、フラットケーブルのコネクタを使っている。また、電池をつなぐためのコネクタを反対側に配置している。上の写真では、外部電源供給のための線がつながったままの状態となっている。
モータードライブ回路の回路図
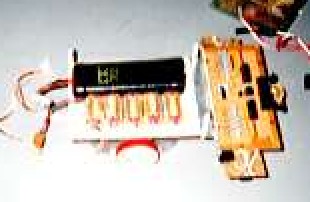
センサ回路

(左)センサ回路を裏返したところ:黒いものがフォトリフレクタ。フォトリフレクタを乗せた小さな基板を、センサ回路の真下に取り付けている。固定は、センサ部後ろのアルミフレーム部分にボルトを使って行っている。
(右)センサ回路を正面から見たところ:アルミフレームには軽量化のため穴をたくさんあけてある。
センサ回路の回路図
各部の結合方法

センサ部アルミフレームを、本体の端と柱を利用して固定する。

CPU部とセンサ部の結合のため、フラットケーブルを前に出している。
第四章 開発の経緯
| 5月 | 久保田先生に車体のプロトタイプを頂く。 CPUボード(1)を作成 |
| 6月 | モータドライブ回路(1)作成 CPUボードへのデータ転送実験成功 MASMプログラムにより、DOS/V機からの制御でモータを回転させるのに成功 |
| 7月 | CPUとモータドライブ回路を接続し、Z80アセンブラプログラムによりモータを回転させるのに成功 台形加減速の実験に成功 |
| 8月 | CPUボード(2)を作成 CPUボード(2)のI/Oポートを8255により増設する センサ回路作成、フォトリフレクタにより物を認識するのに成功 センサ部を車体と合体させる |
| 9月 | CPU用の電源を得るため、三端子レギュレータ回路を作成(結局は採用せず) モータドライブ回路(2)を作成 センサ・モータ・CPUの各部を結合する |
| 10月 | 電池を二つ使うよう仕様変更 MMT展に出展する |
第五章 MMT展での展示
MMT展では、駅前校所蔵の迷路上で簡単な走行デモンストレーションを行った。
第六章 問題点と今後の課題
構造上の問題から、特にセンサ部に問題が多く、改善の必要がある。
 ←センサ部を裏返して解体したところ。
←センサ部を裏返して解体したところ。
問題点
○立体的な結線が多く、線が切れやすい。
○フォトリフレクタのついた基板とセンサ回路の基板が密着しているので、メンテナンスに手間がかかる。
○フレームの構造上、センサ部を修理するためにマウス全体を解体せねばならず、手間がかかる。
○重いセンサ部が前に張り出した構造のため、重心が前に偏ってしまっている。
○フォトリフレクタと壁上面の距離が固定されておらず、不安定である。
○センサの感度が悪く、実用にならない。
○電池や本体が重すぎ、電池の消耗が激しい。
○長いフラットケーブルが前面に集まっており、センサの調整がしにくい。また、ノイズが入りやすい。
今後の課題
◆センサ基板とフォトリフレクタの基板を完全に分け、メンテナンスを容易にする。
◆重いセンサ基板をCPUの上に置き、重心を安定させる。
◆アルミ使用率を下げ、アクリル板などで作り直し、軽量化を図る。
◆センサが確実に動作するようにする。
◆電池を小型化し、軽量化を図る。
◆フラットケーブルをまとめ、長さも短くする。
以上
{kind=link}
{kind=link}
{kind=link}