平成13年2月9日
情報工学科 r00h0390 不死川魔沙王
7.各部の詳細
センサ
MMT展の時は回路部とフォトリフレクタ部が一体型だったため、メンテナンスが難しかった。そこで今回は分離してメンテナンスをしやすくした。

MMT展の時のセンサ(車体前部に取り付けられているもの)
フォトリフレクタ
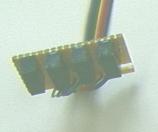
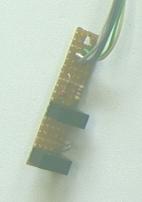
(左)右センサ(中)前センサ(右)左センサ
マイクロマウスは迷路を走るため、前と左右の壁を検知する必要がある。壁検知の方法としては、一般に光反射式センサ(フォトリフレクタ、反射式フォトインタラプタ)が用いられる。今回はオムロンBX17、B10Eを用いた。
フォトリフレクタが壁を検出する方法
フォトリフレクタは発光ダイオードとフォトトランジスタが一つの素子に組み合わされたものである。発光ダイオードが赤外線を発射し、反射光をフォトトランジスタが検出することにより、物体の存在を検知する。
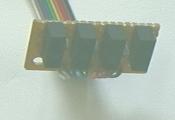
(左より順番にK(カソード)・A(アノード)・C(コレクタ)・E(エミッタ))
具体的には次のような形状をしており、A・K・E・Cに応じた4本の足が出ている。(大きさは8mm×13mm×5.4mm)
フォトリフレクタ配置のパターン
壁の認識方法としては、
1. 壁の上面を検出する方法
2. 壁の側面を検出する方法
の2通りがある。
2の方式が近年の流行だが、距離を測るためにA/Dコンバータが必要となるなどして難しいため、単純に壁の「ある・ない」を判断するだけで済む①の方式をとった。